Researchers from the ELKH Institute of Experimental Medicine (IEM) and the ELKH Wigner Research Centre for Physics (Wigner RCP) have uncovered that the rodent brain represents uncertainty associated with short term predictions during a naturalistic navigation task. The researchers also revealed that multiple options are represented sequentially by selecting hypothetical future trajectories in every ~100 ms corresponding to successive oscillatory cycles. The study was published in the prestigious international journal eLife.
During navigation, we plan our motion trajectory by constantly re-evaluating our decisions based on the incoming sensory information. Often we need to select the one that currently seems the most rewarding amongst multiple alternatives, but in real life situations it is hard to predict the real value of the options.
Animals also face similar challenges. A skua, for example, is chasing a tern to steal its catch (Fig. 1).

Figure 1: Arctic skua chasing a common tern (Image credit: Ferenc Ujfalussy)
To carry out a successful attack, the skua has to react to the escape manoeuvres of its prey within a fraction of a second while both sensory processing and the necessary motor preparations cause substantial temporal delays. The mission seems impossible. Unless the skua has a mental model of the tern’s movements that it can use to predict and to prepare for the next turns and twists of its victim.
Mental models that are able to represent multiple hypothetical options are clearly useful for solving a wide range of complex computational tasks. The neuronal basis of such probabilistic mental models has been poorly understood.
In the present study, the authors investigated how the neuronal activity reflects the uncertainty associated with predictions of future positions in rodents navigating in an open field. Neurons (called place cells) in a brain region called hippocampus become active when the animal visits a specific location within the environment (Fig. 2). When the animal explores the environment multiple place cells become sequentially active, depicting the path taken by the animal.
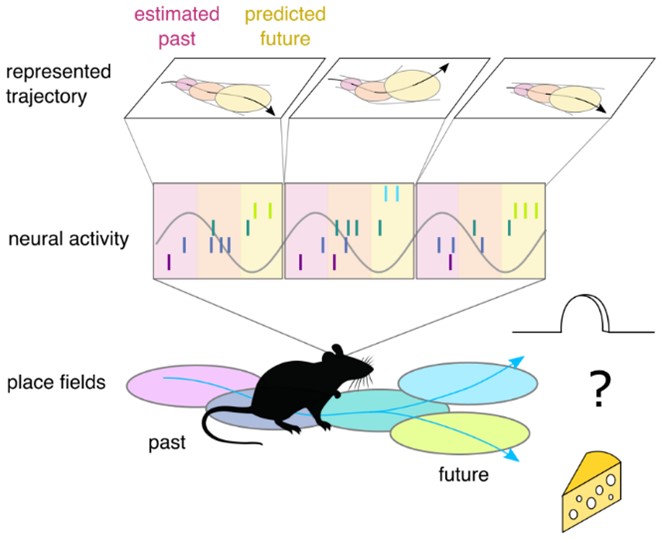
Figure 2: Sequential activity of hippocampal place cells as sampling potential motion trajectories. A set of place cells associated with place fields in the environment (bottom) are activated sequentially (middle, line segments) in each theta cycle (middle, sinusoidal wave). This neuronal sequence can be interpreted as encoding a potential motion trajectory in each theta cycle (top). Each encoded trajectory starts in the past, where uncertainty about the position is low, and ends in the future, where uncertainty is higher.
Place cell sequences also emerge on a shorter temporal scale: In every ~100 ms (an individual cycle of theta oscillation) the sequence is restarted with the neurons corresponding to positions just behind the animal and continued with neurons encoding positions in front of the animal. Previous studies suggested that these fast sequences of place cells’ activity can be interpreted as the neuronal signatures of predictions made by the animal about its own next movement. However, whether the hippocampal neuronal activity also reflects the uncertainty of the predictions was not known.
In the current study the authors re-analysed a previously published dataset to search for the signatures of uncertainty coding during navigation. They first hypothesized that uncertainty may be encoded by representing multiple hypothetical options at the same time, in the form of probability distributions. In this case the uncertainty could be directly read out by the instantaneous neuronal activity. However, they did not find evidence for this possibility. Instead, uncertainty was encoded sequentially by selecting potential motion trajectories randomly in subsequent theta cycles from the distribution of potential trajectories. Moreover, the trajectories encoded in neighboring theta cycles have a tendency to move into different directions, efficiently covering the whole set of options available to the animal (Fig. 3).
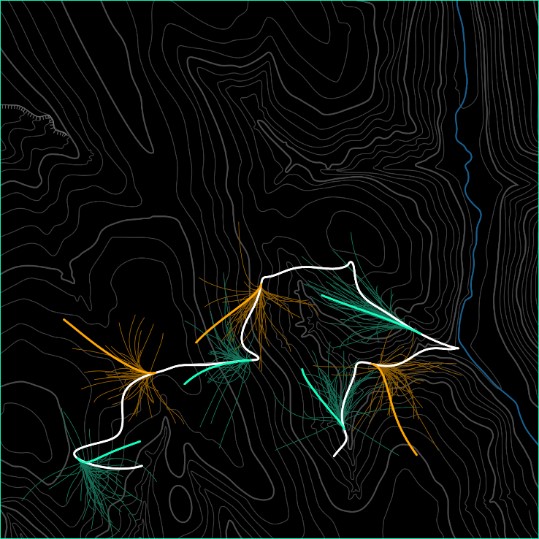
Figure 3: During navigation, rodents use a map-like mental model to constantly sample potential motion-trajectories. In this picture, the real trajectory of a rat (white) is superimposed on a topographic map while potential alternative trajectories are shown in green or orange color. At each moment, the neural activity in the brain represents one hypothetical trajectory (bright color) amongst the many different possibilities (pale colors). The alternating colors highlight that the represented trajectories tend to alternate around the real path of the animal.
The results are directly relevant for engineers designing intelligent systems relying on planning in an uncertain environment. If similar mechanisms exist in the human brain, then the discovery might also help us to understand how we can cope with the presence of uncertainty when making decisions based on the predicted consequences of our actions.
Publication:
Balázs Ujfalussy, Gergő Orbán (2022). Sampling motion trajectories during hippocampal théta sequences. eLife. Doi: 10.7554/eLife.74058